
Objective
To demonstrate how to interpret the Torque and Angle results obtained when using Fieldbus with a QCX or QCD controller.
Environment
All users of Fieldbus and QCX or QCD controllers.
Procedure
When capturing Torque and Angle results using Fieldbus, Measured Torque or Angle is returned as a 4 Byte Hex value. This value should be converted to Floating Point to see the decimal equivalent.
The below data was returned over Fieldbus:
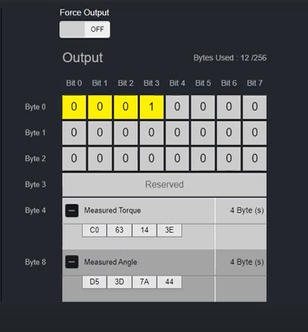
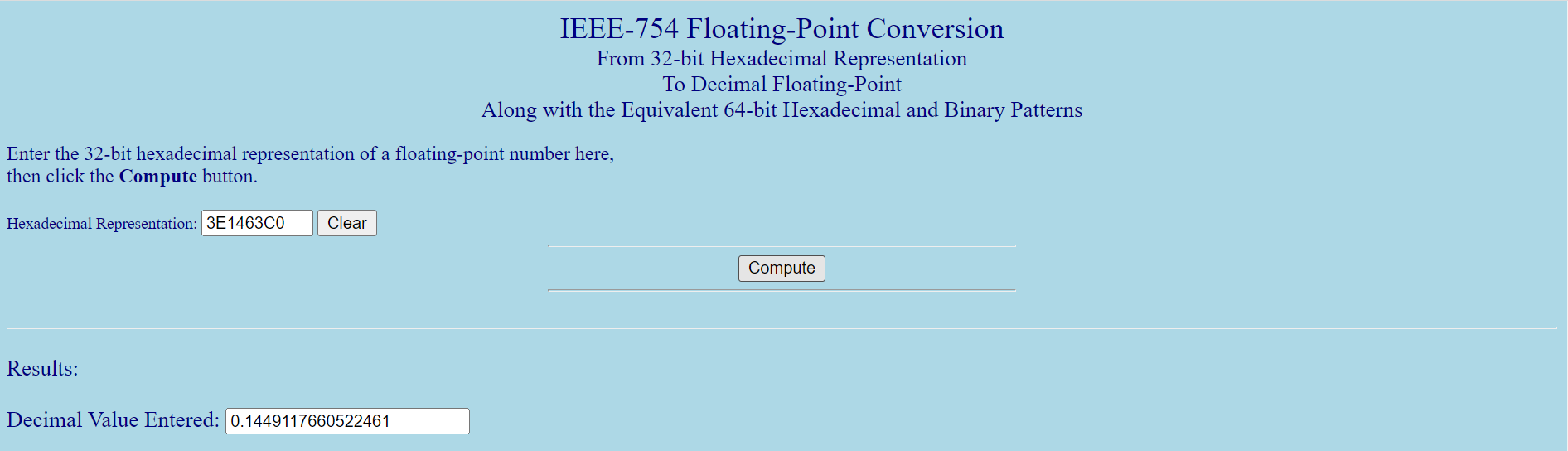
The Measured Torque value of 3E1463C0, when converted to Floating Point, returns a decimal value of 0.1449.
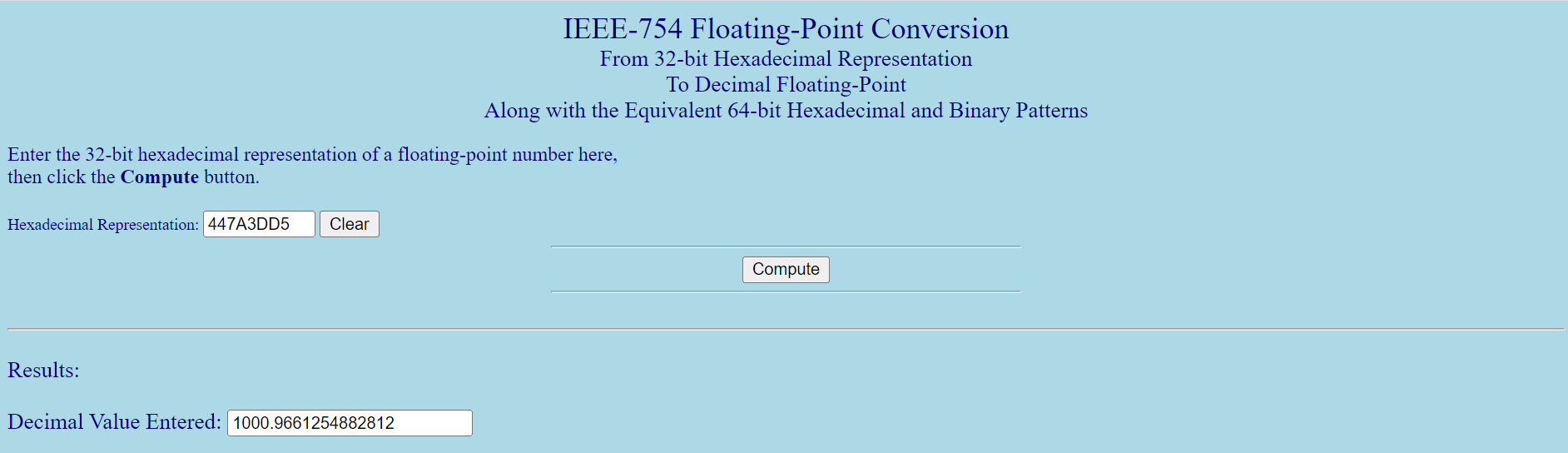
The Measured Angle value of 447A3DD5, when converted to Floating Point, returns a decimal value of 1000.97.
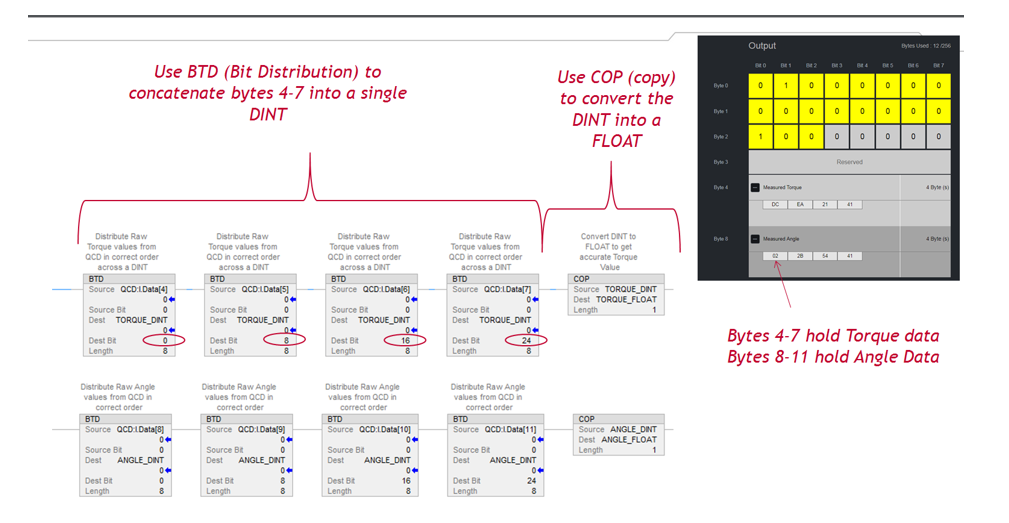
Below is an example of the PLC logic for converting the Measured Torque and Angle.
Comments
0 comments
Please sign in to leave a comment.